
Seçiləni silin
Bu şərhi silmək istədiyinizdən əminsiniz?
Seçiləni silin
Bu şərhi silmək istədiyinizdən əminsiniz?
Seçiləni silin
Bu şərhi silmək istədiyinizdən əminsiniz?
Şikayət et
Bu şərhi şikayət etmək istədiyinizdən əminsiniz?
Xəbər lenti
23:45
Direktor işdən çıxarıldı
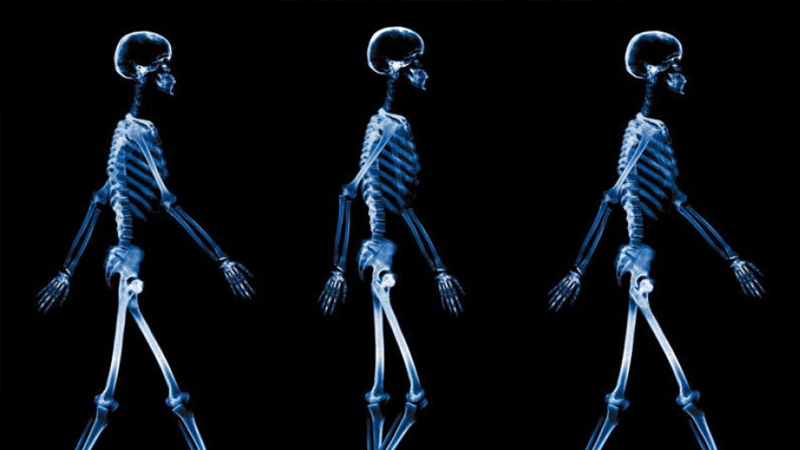
İnsan hərəkətinin yeni mühitlərə uyğunlaşmasını izah edən model hazırlanıb - TƏDQİQAT
İnsan hərəkətinin yeni mühitlərdə necə uyğunlaşdığını izah edən iyerarxik model təqdim olunub.
AZƏRTAC "Medical Press”ə istinadla xəbər verir ki, bununla bağlı Massaçusets Texnologiya İnstitutu (MİT), Ohayo Dövlət Universiteti və "Bright Minds Inc.” müştərək tədqiqat aparıb. İnsanların sabit qalaraq yerimək kimi mürəkkəb tapşırıqları zamanı davamlı uyğunlaşma mexanizmlərini izah edən yeni nəzəri model hazırlanıb. Tədqiqatın nəticələri "Nature Communications” jurnalında dərc olunub.
Məqalənin müəllifləri arasında Massaçusets Texnologiya İnstitutunun (MIT) Beyin və Koqnitiv Elmlər Departamentinin dosenti Nidi Sitaparati, "Bright Minds Inc.”də robototexnika proqram təminatı mühəndisi Barret Klark və Ohayo Dövlət Universitetinin dosenti Manoj Srinivasan yer alırlar. Ənənəvi yanaşmalara əsasən, epizodik tapşırıqlar, məsələn, bir obyektə çatmaq, müəyyən bir müddət üçün tələb olunan hərəkətlərlə məhdudlaşır. Bu zaman bir epizodda baş verən səhvlər növbəti epizoda təsir göstərmir. Lakin hərəkət kimi davamlı tapşırıqlarda səhvlər təkrarlanan təsirlər yarada bilər ki, bu da hərəkətin stabil saxlanılmasını çətinləşdirir. Bu fərq yeni mühitlərdə hərəkət uyğunlaşmasını daha mürəkkəb bir prosesə çevirir.
Nidi Sitaparati qeyd edib ki, uyğunlaşma haqqında əvvəlki nəzəri anlayışlarımız əsasən epizodik tapşırıqlarla məhdudlaşırdı. Yeni nəzəri model isə çoxsaylı lokomotor parametrlər daxilində davamlı uyğunlaşmanı əhatə edir.
Tədqiqatçılar davamlı hərəkət tapşırıqlarında uyğunlaşmanın əsas prinsiplərini müəyyən edərək, hər bir komponentin fərqli riyazi strukturuna əsaslanan iyerarxik və modul yanaşma ilə vahid bir model hazırlayıblar. Bu yanaşma, insanların müxtəlif şəraitdə, məsələn, ayaqların fərqli sürətlə hərəkət etdiyi, ayaqların çəkisinin asimmetrik olduğu və ya ekzoskelet taxıldığı hallarda hərəkətə necə uyğunlaşdığını əks etdirir.
Yeni uyğunlaşma modeli, əvvəllər aparılmış 10 müstəqil tədqiqatın nəticələrini dəqiq təkrarlamağı bacarıb. Bundan əlavə, modelin dəqiqliyi MİT və Ohayo Dövlət Universitetində keçirilmiş iki yeni eksperimentdə də təsdiqlənib. Bu təcrübələrdə iştirakçılar yeni şəraitdə gəzintiyə məruz qalıb və onların uyğunlaşma davranışları proqnozlaşdırılıb. Nəticələr modelin insan hərəkətinin uyğunlaşma mexanizmini dəqiq izah edə bildiyini göstərib. Alimlər hesab edirlər ki, yeni uyğunlaşma modelinin bir çox sahədə tətbiqi mümkündür. Bu tətbiq sahələrinə sensorimotor öyrənmə, reabilitasiya texnologiyaları və geyilə bilən robot texnologiyaları daxildir.
Bu tədqiqat insan hərəkətində uyğunlaşma mexanizminin daha dərin və kompleks olduğunu göstərir. Yeni nəzəri model yalnız insan hərəkətini anlamağa deyil, həm də reabilitasiya və robot texnologiyalarında irəliləyişlərə yol açır. Gələcək tədqiqatların bu modelin daha da təkmilləşdirilməsinə və insan-robot qarşılıqlı təsirində yeni yanaşmalara töhfə verəcəyi gözlənilir.






Oxşar xəbərlər









Bloqlar





Pozitiv dünyadan çıx
Pozitiv dünyadan çıxmaq istədiyinizdən əminsiniz?
Xəbərdarlıq
DİQQƏT! Qaynarinfo.az-ın açıq materiallarının olduğu kimi surətini çıxarmaq, digər saytlara yerləşdirmək, yaymaq qadağandır. Qanunvericiliyə əsasən açıq materialların yalnız 1/3 hissəsindən istifadə etmək olar. Əks halda məsələ məhkəmə predmeti ola bilər!
Şərhlər